系统展示

全网概况与拓扑展示
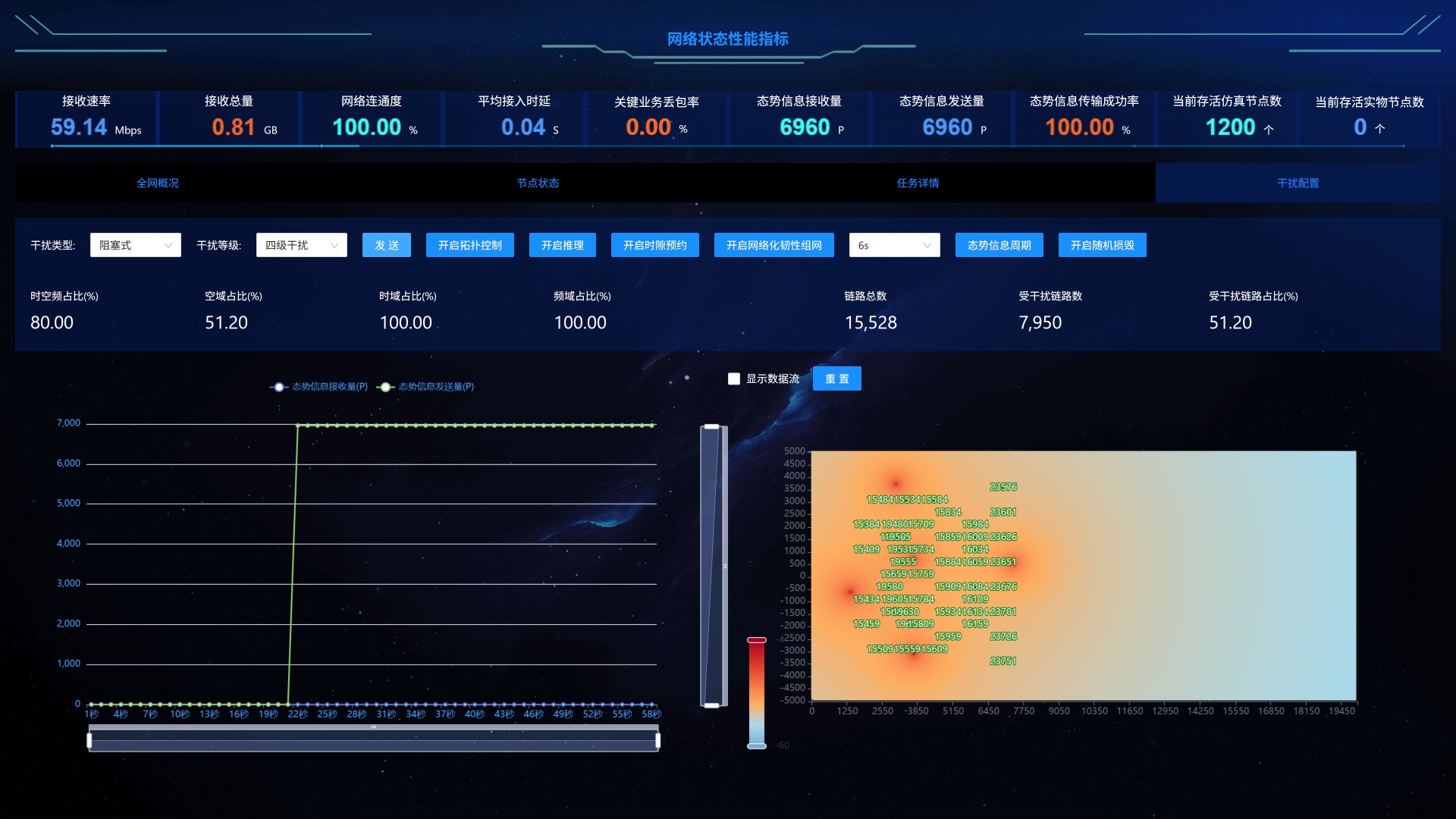
实时展示网络性能指标与节点拓扑关系,支持多类型节点区分显示,直观呈现网络状态。
干扰对抗模拟
支持多种干扰类型与强度配置,实时监控受干扰链路占比,提供链路受干扰热力图可视化。

任务闭环评估
对比分析任务推理与无推理模式下的杀伤链信息闭环时间,提供任务执行时间轴可视化与多任务协同支援规划。
面向复杂电磁环境的多无人平台协同组网、干扰对抗与任务闭环评估系统
本项目是一套面向复杂电磁环境下多无人平台协同作战的分布式网络态势感知与性能评估系统, 针对无人车、无人机、无人船等异构节点组成的动态网络,提供实时拓扑监控、干扰对抗模拟、 任务闭环评估等核心能力。
系统采用前后端分离架构,前端基于 Vue3 + Ant Design 构建科技感可视化界面,后端基于 Node.js + Express 提供高性能 API 服务, 通过 UDP Socket 与底层仿真引擎通信,实现了从数据采集、态势分析到决策评估的全流程闭环。
实时展示无人车、无人机、无人船等节点的网络拓扑关系,支持簇首拓扑视图,直观呈现节点间连接状态与链路质量。
支持阻塞式、压制式等多种干扰类型模拟,可配置四级干扰强度,实时监控受干扰链路占比与网络性能变化。
支持任务推理与无推理两种模式对比,量化评估杀伤链信息闭环时间,提供任务执行时间轴可视化。
采用 Vue3 + Express 前后端分离架构,前端实现低延迟数据可视化,后端通过 UDP Socket 与仿真引擎高效通信,支持高并发请求处理。
实现网络拓扑图、性能指标曲线、干扰热力图、任务时间轴等多维度可视化组件,直观呈现复杂网络状态与任务执行情况。
支持阻塞式、压制式等多种干扰类型,可配置空/时/频域占比参数,模拟四级干扰强度,评估网络抗干扰性能。
实现任务推理与无推理两种模式对比,量化评估杀伤链信息闭环时间,提供任务执行时间轴可视化与多任务协同支援规划。
实时展示网络性能指标与节点拓扑关系,支持多类型节点区分显示,直观呈现网络状态。
支持多种干扰类型与强度配置,实时监控受干扰链路占比,提供链路受干扰热力图可视化。
对比分析任务推理与无推理模式下的杀伤链信息闭环时间,提供任务执行时间轴可视化与多任务协同支援规划。

扫码添加微信,快速沟通
邮箱:stormykj@163.com
中国 · 西安市
支持上门洽谈 / 线上会议